Ovládanie robota pomocou mobilného telefónu
Kategorie: Průmysl
Přidal: AttoIgy 18.03.2015 (19:50:56) X U
Popis aplikácie: Aplikácia pre mobilné zariadenie je stavaná pre dotykový mobil s podporov MIDlet technológie. Dotykové mobilné zariadenie od spoločnosti Samsung typ GT-S5620 podporuje Java aplikácie a MIDlet 2.1. Bluetooth komunikácia s podporov Java nástrojov Java API a knižníc java.bluetooh.
Prijatie dát od robota: Prijatie dát cez bluetooth do robota má za úlohu funkcia „prijmi“, ktorá má vstupnú premennú InputStream pomocou, ktorej môžem čítať dáta. Vo funkcií je vytvorené bytové pole „dataprijmi“. Do poľa sa bude vkladať všetko čo príde na vstup. InputStream obsahu funkciu is.read(dataprijmi, 0, dataprijmi.length). Následne si dáta prepíšeme do stringu str = new String(dataprijmi). Tieto hodnoty v stringoch porovnávam a zisťujem o akú kódovú správu ide.
Pre správne prijatie správy ako spätnú väzbu dostávame kód: AOK000000F. Stav robota o koľko sa otočil podľa toho aký uhol sme mu poslali, kde šieste písmenko buď P alebo N nám udáva P+ alebo N- uhol, uhol otočenia 90°: AUHOKP090F, AUHOKN090F. Pre potvrdenie, že robot sa dostal na žiadanú hodnotu a následné poslanie nových hodnôt prijmem kód od robota: APOOK0000F. Ak sa niečo stane s robotom pošle nám kód: AER000000F, tým sa v zložke „Graf“ zobrazí status robota ako ER.
Od robota budeme dostávať aktuálnu pozíciu cca každé 2s, správa bude zakódovaná v tvare: AC0506000F , kde C indikuje že ide o prijatie vzdialenosti, v ktorej sa aktuálne nachádza a rýchlostný stupeň.
Popis robota: Robot sa skladá z niekoľkých častí. Prvá z nich tvorí mechanická. Skladá sa z diferenciálneho podvozku s dvomi krokovými motormi Sanio CP-047. Z nich je moment prenášaný na kolieska pomocou ozubeného prevodu s pomerom 1:4. Podvozok má namiesto tretieho pasívneho kolieska statický oporný bod, ktorý sa kĺže po podložke. Konštrukcia je vyrobená z plechu hrúbky 0,5mm, ktorý pochádza zo starej počítačovej skrinky. V jej vnútri je priestor pre 8 akumulátorov typu AA, ktoré sú zdrojom energie pre robota.
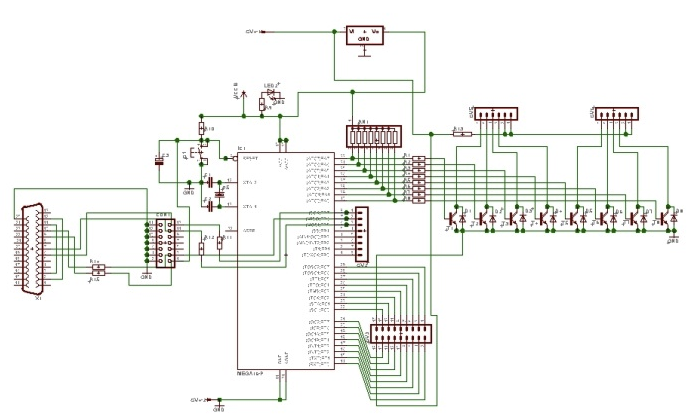
Hlavná doska: Robot je riadený mikrokontroérom ATmega32 od spoločnosti Atmel. Ten komunikuje prostredníctvom bluetooth modulu s aplikáciou v mobilnom telefóne. Okrem neho sa na hlavnej doske nachádza stabilizátor napätia L78L05, ktorý „vyrába“ napájanie pre mikrokontrolér. Taktiež sú na tejto doske umiestnené budiče pre motory. Tieto sú tvorene zo spínacích tranzistorov BU406. Existujú aj integrované budiče, avšak z dôvodu väčšej prúdovej zaťažiteľnosti sme sa rozhodli použiť tranzistory v separátnych púzdrach. Všetkých osem tranzistorov je mechanicky spojených elektricky izolovaným chladičom.
Prijatie dát od robota: Prijatie dát cez bluetooth do robota má za úlohu funkcia „prijmi“, ktorá má vstupnú premennú InputStream pomocou, ktorej môžem čítať dáta. Vo funkcií je vytvorené bytové pole „dataprijmi“. Do poľa sa bude vkladať všetko čo príde na vstup. InputStream obsahu funkciu is.read(dataprijmi, 0, dataprijmi.length). Následne si dáta prepíšeme do stringu str = new String(dataprijmi). Tieto hodnoty v stringoch porovnávam a zisťujem o akú kódovú správu ide.
Pre správne prijatie správy ako spätnú väzbu dostávame kód: AOK000000F. Stav robota o koľko sa otočil podľa toho aký uhol sme mu poslali, kde šieste písmenko buď P alebo N nám udáva P+ alebo N- uhol, uhol otočenia 90°: AUHOKP090F, AUHOKN090F. Pre potvrdenie, že robot sa dostal na žiadanú hodnotu a následné poslanie nových hodnôt prijmem kód od robota: APOOK0000F. Ak sa niečo stane s robotom pošle nám kód: AER000000F, tým sa v zložke „Graf“ zobrazí status robota ako ER.
Od robota budeme dostávať aktuálnu pozíciu cca každé 2s, správa bude zakódovaná v tvare: AC0506000F , kde C indikuje že ide o prijatie vzdialenosti, v ktorej sa aktuálne nachádza a rýchlostný stupeň.
Popis robota: Robot sa skladá z niekoľkých častí. Prvá z nich tvorí mechanická. Skladá sa z diferenciálneho podvozku s dvomi krokovými motormi Sanio CP-047. Z nich je moment prenášaný na kolieska pomocou ozubeného prevodu s pomerom 1:4. Podvozok má namiesto tretieho pasívneho kolieska statický oporný bod, ktorý sa kĺže po podložke. Konštrukcia je vyrobená z plechu hrúbky 0,5mm, ktorý pochádza zo starej počítačovej skrinky. V jej vnútri je priestor pre 8 akumulátorov typu AA, ktoré sú zdrojom energie pre robota.
Hlavná doska: Robot je riadený mikrokontroérom ATmega32 od spoločnosti Atmel. Ten komunikuje prostredníctvom bluetooth modulu s aplikáciou v mobilnom telefóne. Okrem neho sa na hlavnej doske nachádza stabilizátor napätia L78L05, ktorý „vyrába“ napájanie pre mikrokontrolér. Taktiež sú na tejto doske umiestnené budiče pre motory. Tieto sú tvorene zo spínacích tranzistorov BU406. Existujú aj integrované budiče, avšak z dôvodu väčšej prúdovej zaťažiteľnosti sme sa rozhodli použiť tranzistory v separátnych púzdrach. Všetkých osem tranzistorov je mechanicky spojených elektricky izolovaným chladičom.